0571-26692003
No. 181 Geyazhuang, Xihu District,Hangzhou, Zhejiang, P.R. China


This project is committed to pushing the limits of robotic tactile perception and autonomous manipulation capabilities, providing core products and solutions such as fingertip multimodal tactile sensors, handheld micrometer-level tactile measurement modules, and autonomously operated dexterous hands, leading the development of next-generation intelligent-machine perception and manipulation technologies.
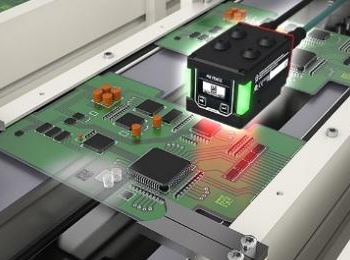
(1) High-precision measurement of three-dimensional surface morphology features
In industries such as energy, automotive, and manufacturing, tactile sensing technology is used to measure the three-dimensional surface morphology features of components, such as defect detection and measurements of thickness, roughness, and material properties.
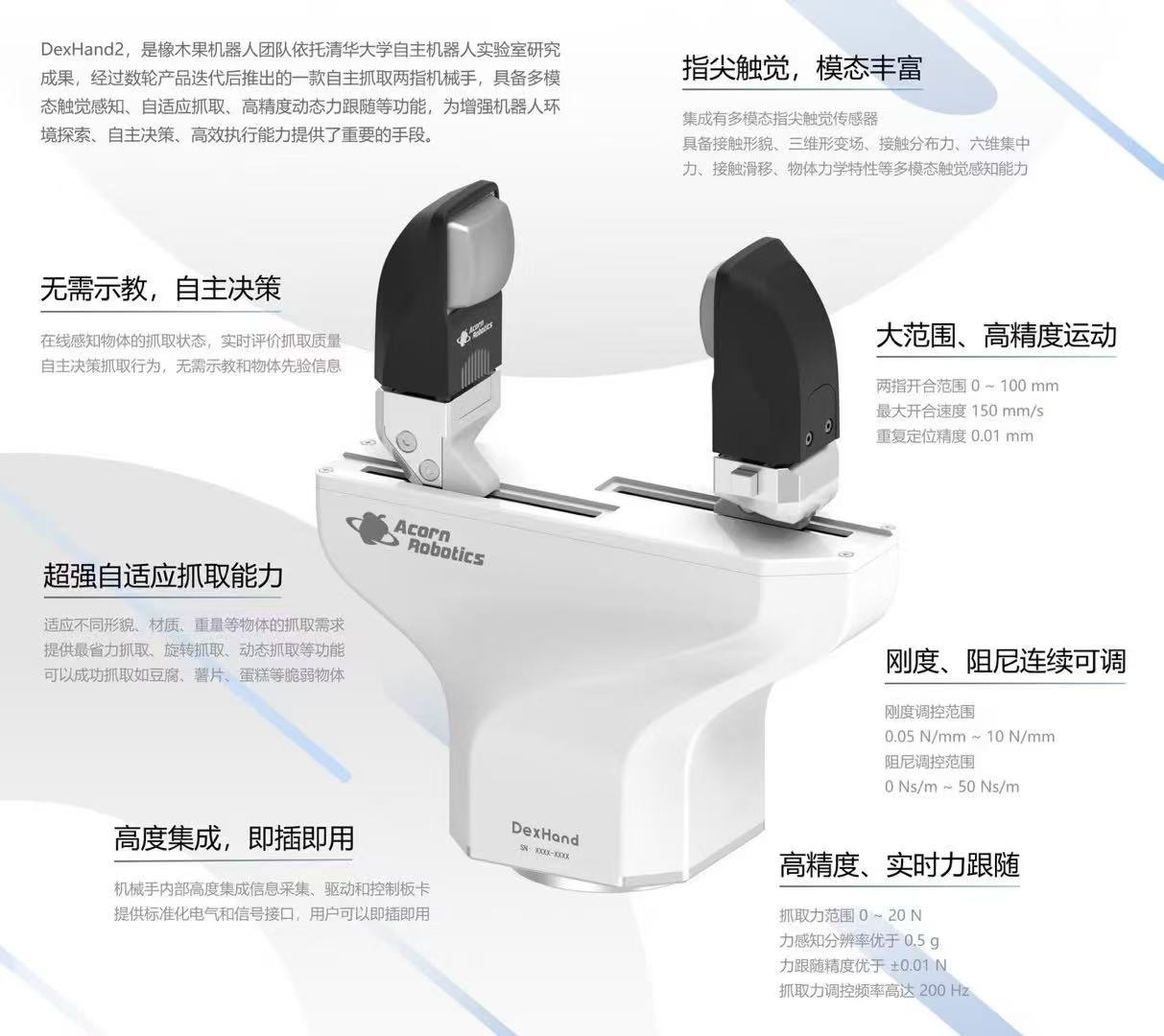
(2) Efficient and flexible grasping of multi-category objects
In industries such as logistics, manufacturing, and agriculture, by using tactile perception of the mechanical characteristics of objects in combination with autonomous grasping technology, adaptive grasping of multi-category objects can be achieved.
(3) Flexible Assembly of Diverse Components
In industries such as automotive, 3C, and aerospace and aviation, by using tactile perception of assembly states in combination with autonomous assembly technology, flexible assembly of diverse components can be achieved
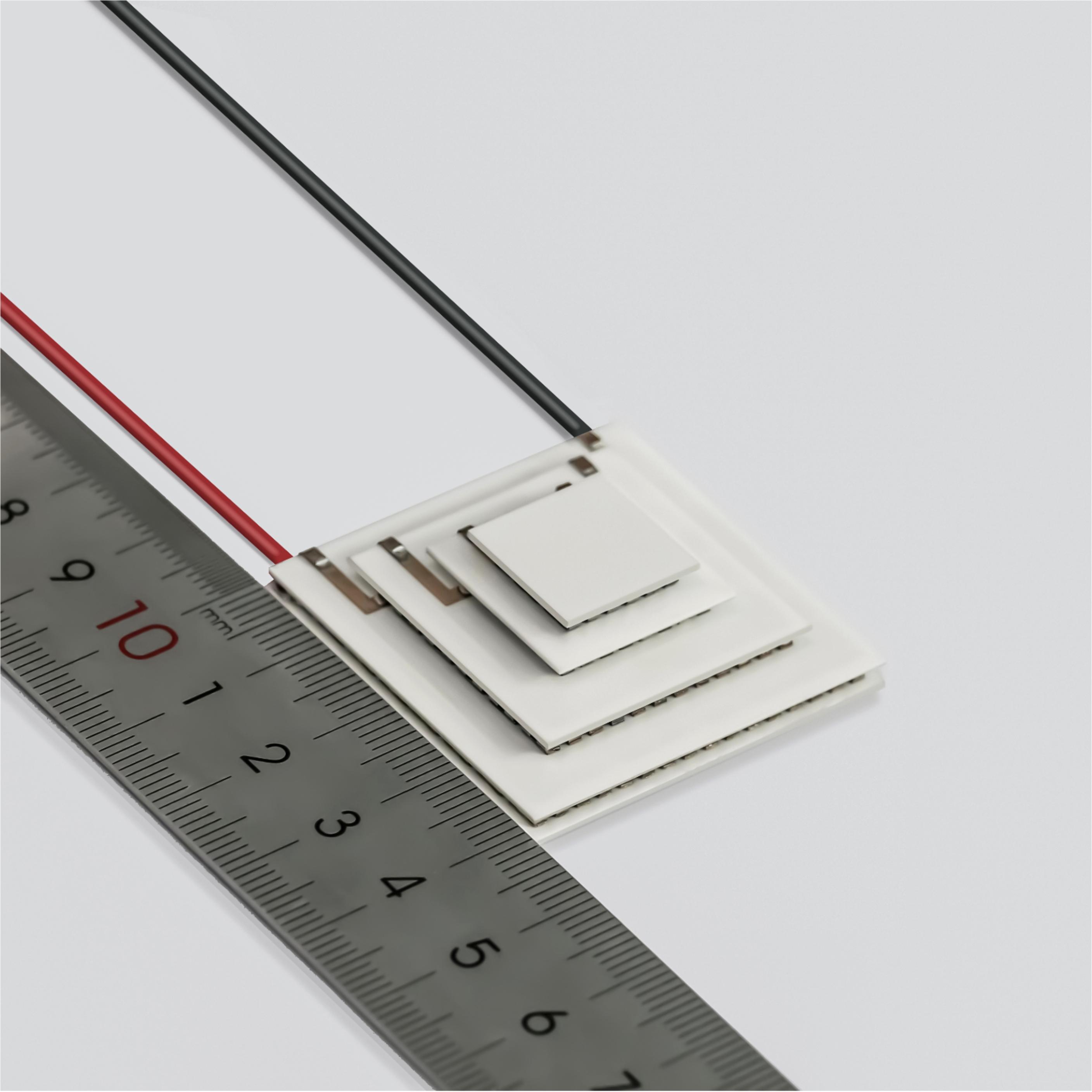
(1) Tactile sensing technology based on model reconstruction principles
The Tac3D fingertip multimodal tactile sensor product, with an information sensing density ten times that of the human hand, is the first sensor that simultaneously provides multimodal tactile information measurement functions including contact morphology, deformation, concentrated force, distributed force, slip, as well as the object’s friction coefficient, hardness/softness, and mass distribution
(2) Instinct-driven autonomous manipulation skills for robots
A comprehensive strategy system for robot manipulation skill generation, failure recovery, and reinforced learning that integrates visual and tactile information, enabling manipulation capabilities comparable to the human hand.